In questo articolo viene descritta la scheda di sviluppo Seeeduino XIAO
Le specifiche generali della scheda sono le seguenti
| Caratteristica | Valore |
|---|---|
| CPU | ARM Cortex-M0+ CPU(SAMD21G18) funzionante fino a 48MHz |
| Flash Memory | 256KB |
| SRAM | 32KB |
| Ingressi/Uscite Digitali | 11 |
| Ingressi/Uscite Analogiche | 11 |
| Interfacce I2C | 1 |
| Interfacce SPI | 1 |
| Interfaccia UART | 1 |
| Led Alimentazione | Verde |
| Led di test | Giallo |
| Led per Comunicazione Seriale in Ricezione | Blu |
| Led per Comunicazione Seriale in Trasmissione | Blu |
| Porta di alimentazione e caricamento firmware | USB Type C |
| Tensione Alimentazione | 3.3V/5V DC |
| Dimensioni | 20×17.5×3.5mm |
Come si evince dalla tabella delle specifiche aspetti peculiari della scheda sono i seguenti
- Ha una microcontroler SAMD21G18 ARM® Cortex®-M0+ 32bit 48MHz con 256KB Flash,32KB SRAM.
- Compatibile con IDE Arduino e CircuitPython.
- Adatta per progettazione veloce con Breadboard.
- Di piccole dimensione (20×17.5mm), per cui adatta per progetti di dispositivi indossabilli e piccoli progetti.
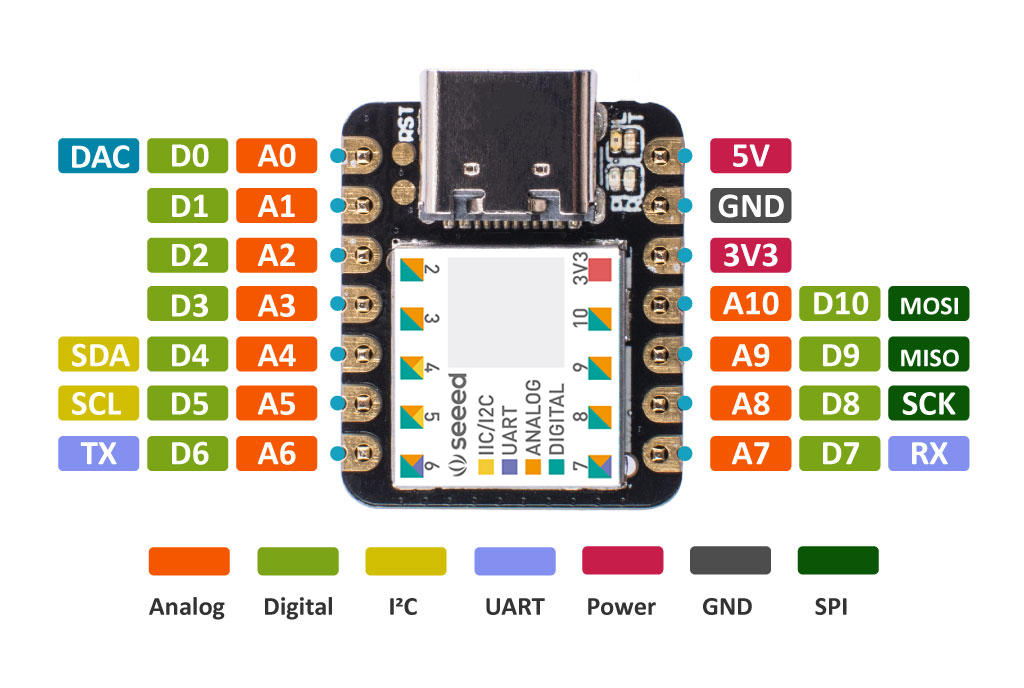
- Molteplici interfacce a disposizione: 11 pin digitali/analogici, 10 Pin PWM, 1 uscita DAC , 1 interfaccia Pad SWD, 1 interfaccia I2C , 1 interfaccia UART, 1 interfaccia SPI.
Di seguito i link per i wiki di Seeedstudio per la configurazione con Arduino e CircuitPython
Seeeduino XIAO con IDE Arduino
Seeeeduino XIAO con CircuitPython
CircuitPython è un progetto derivato da Micropython semplificato per microcontrollori
La programmazione del dispositivo avviene mediante connessione USB Type C. Offre anche nella parte inferiore pad per alimentazione nonché l’interfaccia di debug SWD (Serial Wire Debug).
 La scheda supporta il pin multiplexing ed uno stesso pin può essere utilizzato a seconda della funzione che lo richiama come pin analogico, digitale, ecc.
La scheda supporta il pin multiplexing ed uno stesso pin può essere utilizzato a seconda della funzione che lo richiama come pin analogico, digitale, ecc.
Sulla parte superiore della scheda sono presenti due pin per il reset della scheda stessa e per l’impostazione in modalità dfu per il caricamento di altro bootloader (per esempio CircuitPython).
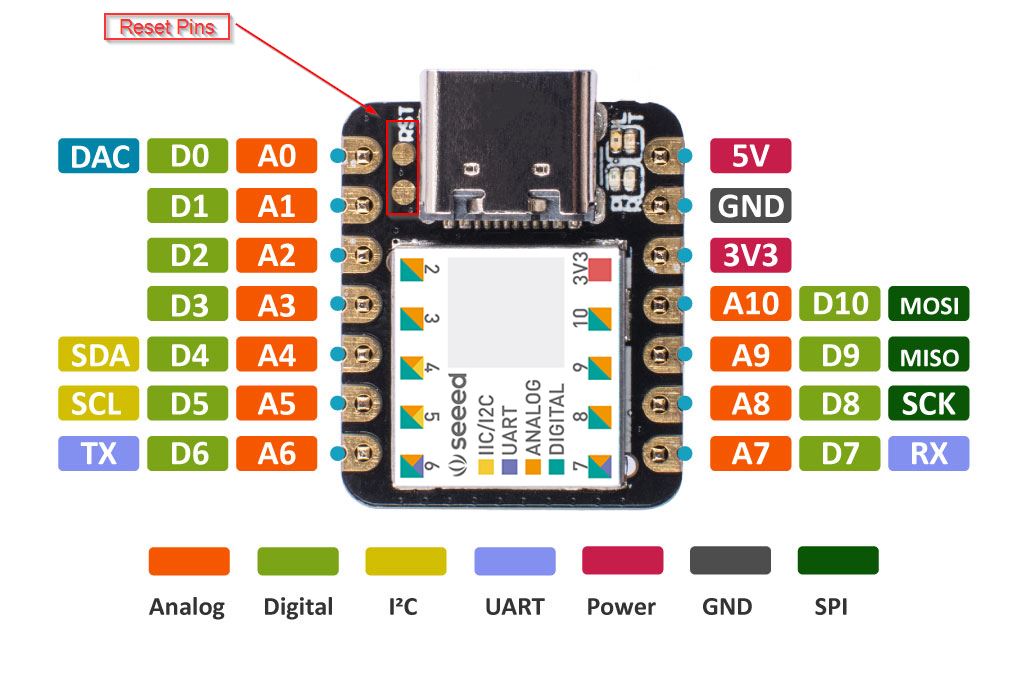 Per eseguire il reset o caricare altro bootloader collegare la scheda tramite USB Type C e resettare cortocircuitando velocemente i pin di reset. Quando il led arancione incomicia a illuminarsi con sfarfallio la scheda è pronta per caricare il firmware. Usare questo metodo anche nel caso in cui la scheda non risulti più visibile sulla porta USB del PC.
Per eseguire il reset o caricare altro bootloader collegare la scheda tramite USB Type C e resettare cortocircuitando velocemente i pin di reset. Quando il led arancione incomicia a illuminarsi con sfarfallio la scheda è pronta per caricare il firmware. Usare questo metodo anche nel caso in cui la scheda non risulti più visibile sulla porta USB del PC.
La scheda è disponibile direttamente dal sito Seeed
Nel prossimi articoli impostiamo l’IDE Arduino per un piccolo progetto con Seeeduino XIAO
Seeeduino XIAO – Ambiente Arduino
Informazioni su Seeed
Seeed è un abilitatore hardware IoT che fornisce servizi per oltre 10 anni che consentono ai produttori di realizzare i loro progetti e prodotti. Seeed offre una vasta gamma di piattaforme hardware e moduli sensore pronti per essere integrati con le piattaforme IoT esistenti e la produzione di PCB ed il servizio di assemblaggio PCB. Seeed Studio offre una vasta gamma di componenti elettronici tra cui Arduino Raspberry Pi ee altre diverse piattaforme per schede di sviluppo. Soprattutto il sistema Grove aiuta ingegneri e produttori ad evitare problemi con i ponticelli. Seeed Studio ha sviluppato oltre 280 moduli Grove che coprono una vasta gamma di applicazioni in grado di soddisfare una varietà di esigenze.